陈晓颖/副教授/博士 康杰/高级实验师/硕士
科研成果简介:
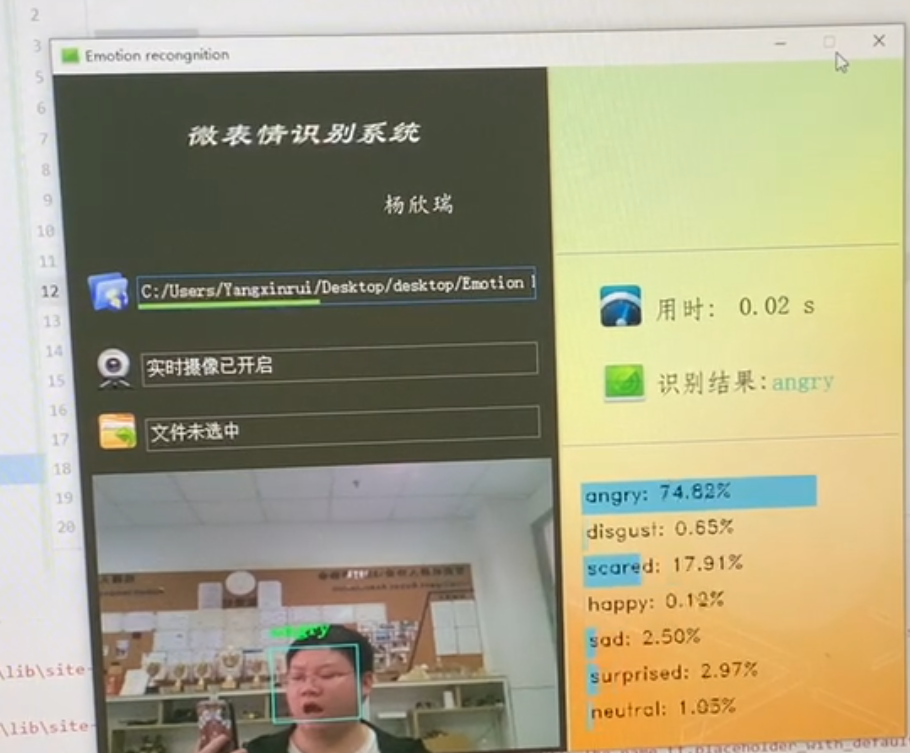
1.桂林电子科技大学广西自动检测技术与仪器重点实验室开放课题:机器人的微表情识别技术研究
计算机视觉识别技术作为人工智能领域的重要分支,近年来在教育、工业、医疗等多个领域展现出巨大的应用潜力。依托主持的科研项目《微表情识别技术研究》,所在团队发表了一篇相关的SCI论文“Research on a Microexpression Recognition Technology Based on Multimodal Fusion”。之后在论文所用的深度学习算法基础上,指导了多项优秀毕业设计和省级双创项目,获得多项相关竞赛奖项,并将其应用于教育教学实践,通过多种形式科技创新活动,探索出一条科研反哺教学的有效路径。
2.江苏省社科联项目:微表情视觉识别技术科技伦理对策研究
课题在人工智能伦理研究领域填补了微表情识别技术规制方面的学术空白,为人工智能技术的伦理规范与社会责任研究提供了理论支持;在应用价值上,本研究为政府制定相关法律法规提供了政策依据,特别是在隐私保护和技术使用边界方面具有重要的指导意义。同时,研究为企业在商业应用中的社会责任建设提供了参考,推动技术在商业与社会福祉中的平衡发展。
3.横向科研:基于机器视觉垃圾分类装置研发
课题基于机器视觉垃圾分类装置研发,满足城市社区日常生活垃圾分类需求,利用OpenMV机器视觉相关算法采集充足数据集进行分析保证识别率等。
4.横向科研:仪表盘示数识别系统研发
课题开展一种仪表盘示数识别系统研发,满足高危行业中机械表盘示数读取识别的需求。视觉摄像头获取机械仪表的读数情况的图像,然后基于机器视觉处理技术得到处理结果,并将读数结果反馈。
视觉智能驱动创新:机器人专业科创融合的培养路径探索
随着工业4.0和中国制造2025的推进,机器视觉技术成为智能制造领域的关键技术之一。然而,机器视觉技术涵盖机械、电子、图像处理、模式识别及编程技术等多个领域,对人才的综合能力要求极高。结合科研成果,创新课程体系,开展多形式科技创新实践活动,培养大学生的创新精神和实践能力,指导学生参加大学生创新创业训练计划项目以及相关的竞赛,使学生的能力得到锻炼和提高。
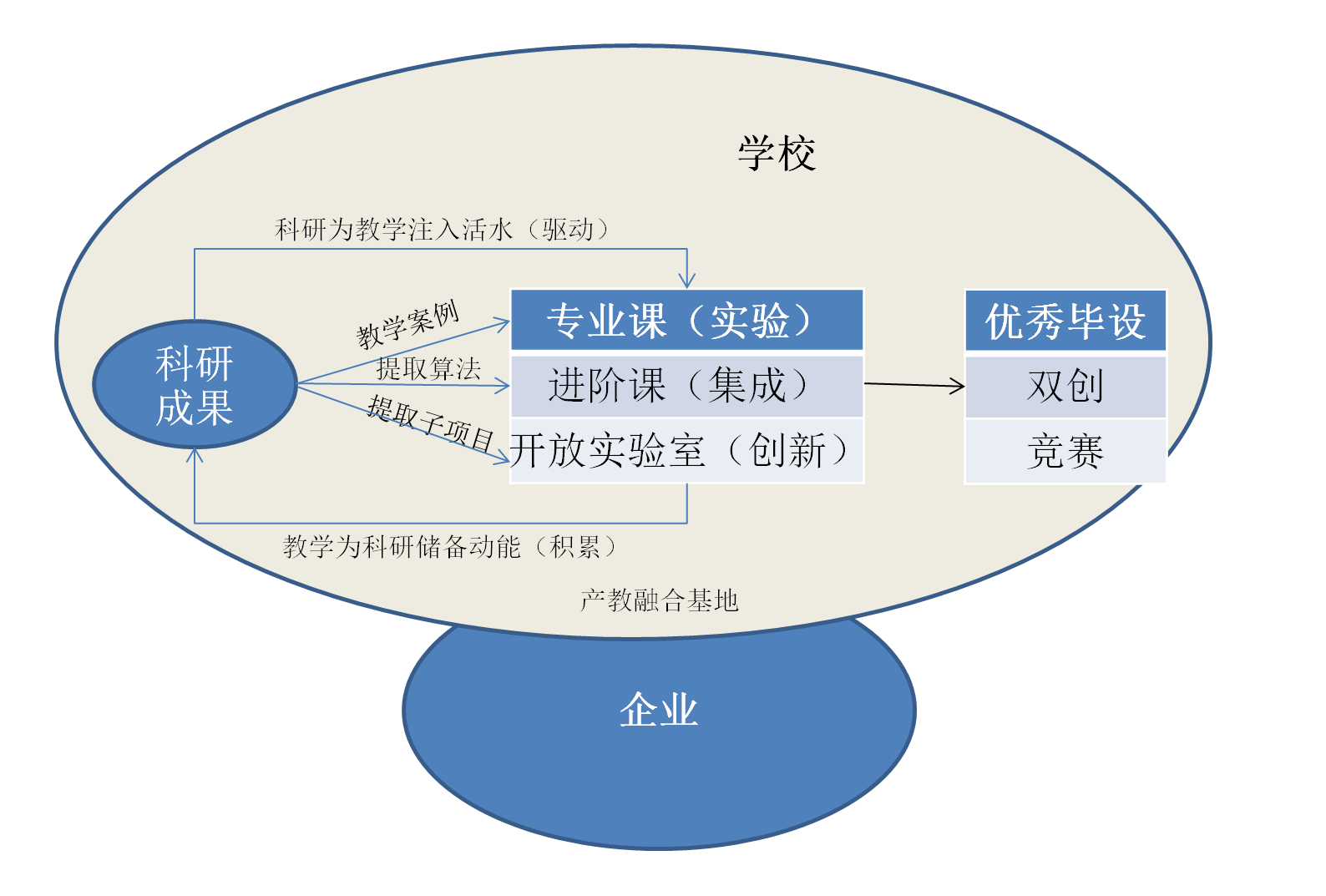
团队通过科研项目——教学资源——实践平台“三螺旋联动机制”,构建全链条培养体系,如下图所示。
一、科研反哺教学内容
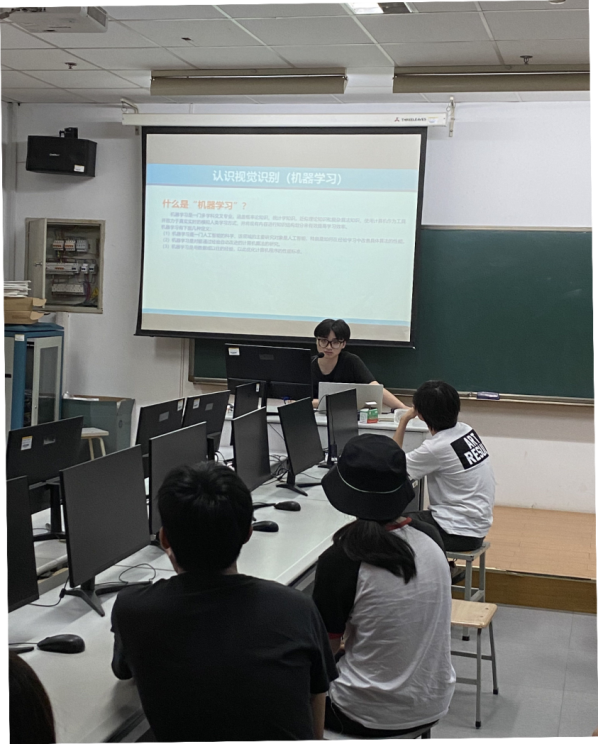
前沿技术下沉:团队将计算机视觉识别技术的研究成果直接转化为教学内容,建设了科创融合课程《机器视觉—“人物识别”》,其课程情况如下图所示。课程内容结合了科研项目中的实际案例,引入深度学习算法、目标检测技术等内容,使学生能够接触到前沿的科研成果,拓宽知识面。

应用技术落地:聚焦工业现场的视觉检测与精准控制需求,将视觉技术融入到最新的应用中,建成了机器人控制与机器视觉实验室和工业机器人视觉应用系统实验室。
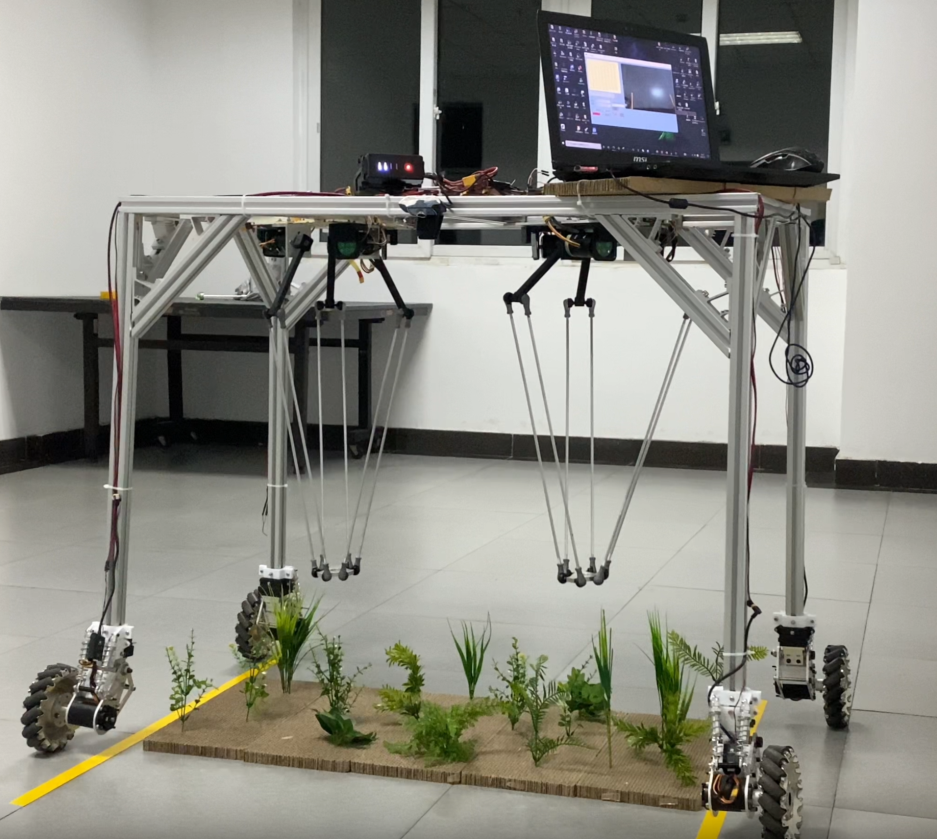
教学水平提升:团队的作品“移动并联多功能农业机器人”获得全国高校教师元宇宙数字化技术创新大赛。康杰老师多次被评为优秀指导老师。
二、推动平台建设
在科研中体会到智能视觉技术对本专业的影响越来越重要,因此依托三江学院-南京埃斯顿自动化股份有限公司工业机器人产教融合实习基地建设,以视觉智能为牵引,建立的工业机器人视觉应用系统实验室,将2D、3D视觉技术应用到工业机器人的多种应用中,以复杂系统开发为载体,以产业需求为导向,为多门课程提供了实践条件和教学案例。探索研教产的闭环机制,形成“阶梯式”评价体系,建立“基础实验→系统集成→创新应用”的三级能力评估模型,量化学生成长轨迹。
三、项目驱动培养
纵向课题渗透:本科生参与老师的在研项目,比如微表情识别技术研究,承担数据标注、模型轻量化等子任务。在教学过程中,团队将科研项目中的实验数据、算法模型和实验设备引入课堂,丰富了教学手段。例如,通过实验室的深度学习平台,学生可以亲自操作基于yolov的深度学习目标检测算法的训练和测试。此外,课程还引入了基于OpenCV的图像识别实验,让学生在实践中掌握复杂的技术原理。
社科项目引导:通过江苏省社科联项目“微表情视觉识别技术科技伦理对策研究”,引导大家对工程伦理的关注。
横向课题实战:联合企业开展横向课题“基于机器视觉垃圾分类装置研发”和“仪表盘示数识别系统研发”,使学生团队参与完整的科研项目,提高应用能力。
四、科创深度融合
团队通过科研项目反哺学生科技创新活动,指导学生申报创新创业训练计划项目,获得省级创新项目6项。此外,团队还指导学生参加视觉类竞赛,近年来获得视觉类相关的省级优秀毕业论文2项,其中1项为团队;校级优秀毕业论文6项。
五、总结与反思
通过科研项目,不断地更新自己的知识体系,在教学中引入最新的研究成果和行业动态,提高教学内容的时效性和深度。学生的参与和反馈能够为科研提供新的视角和思路,同时,教学过程中发现的问题也可以成为科研的新课题。
科研反哺教学能够提高学生的批判性思维能力、创新能力和实践能力。通过参与科研项目,学生能够将理论知识与实际问题相结合,提高解决问题的能力。科研反哺教学的实施需要教师具备较强的科研能力和教学技巧,这对教师的专业发展提出了更高的要求。同时,如何平衡科研与教学的关系,确保两者的协调发展,也是需要解决的问题。
本案例可形成“以视觉智能为牵引,以复杂系统开发为载体、以产业需求为导向”的特色培养范式,为新工科背景下机器人领域创新型人才培养提供可复制的实践方案。
附:科研反哺学生作品集
1.优秀毕业设计
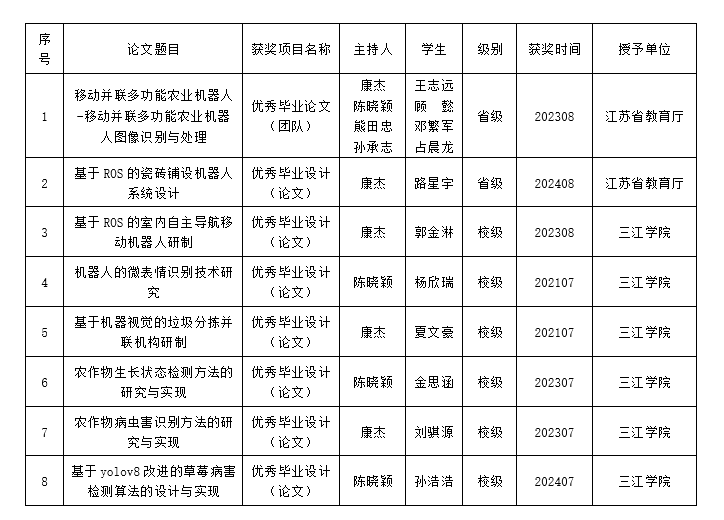
结合承担的科研课题,拟定学生毕业论文(设计)题目,指导学生选做,为毕业论文提供实践性课题,进一步提高毕业论文的质量和水平。近年来获得视觉类相关的省级优秀毕业论文2项,其中1项为团队;校级优秀毕业论文6项,具体如下表所示。
2.省级双创
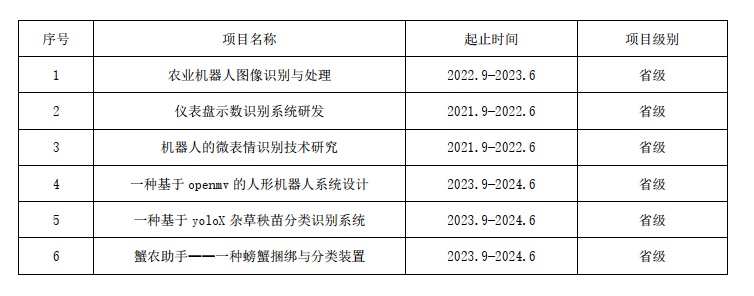
指导学生申报创新创业训练计划项目。获得省级创新项目6项,具体如下表所示。
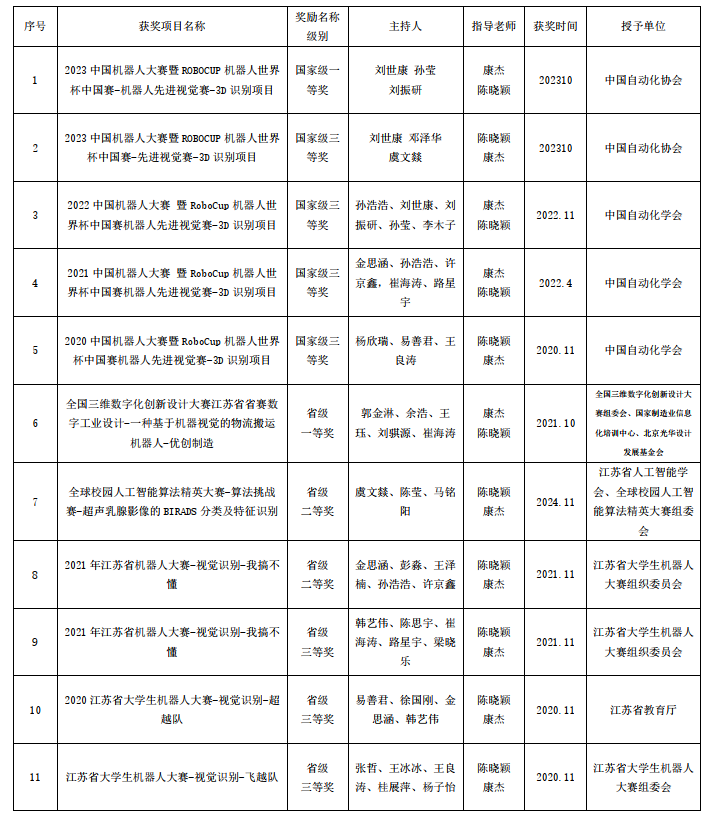
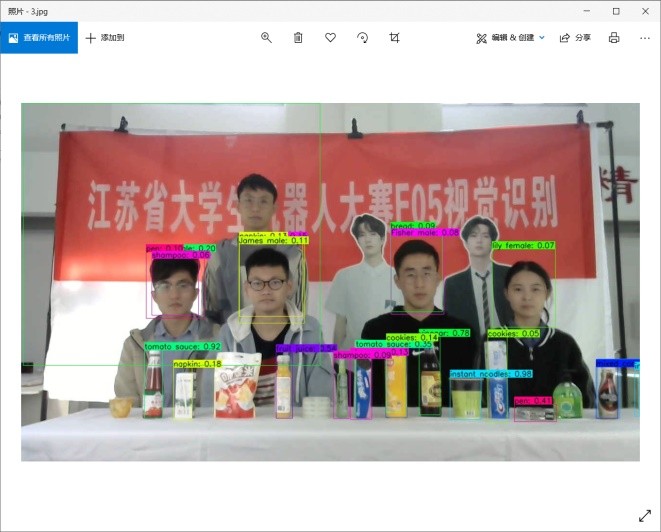
3.竞赛获奖
指导学生参加竞赛获得视觉类相关竞赛有国家级一等奖1项、三等奖4项;省级一等奖1项、二等奖2项、三等奖3项,具体如下表所示。